

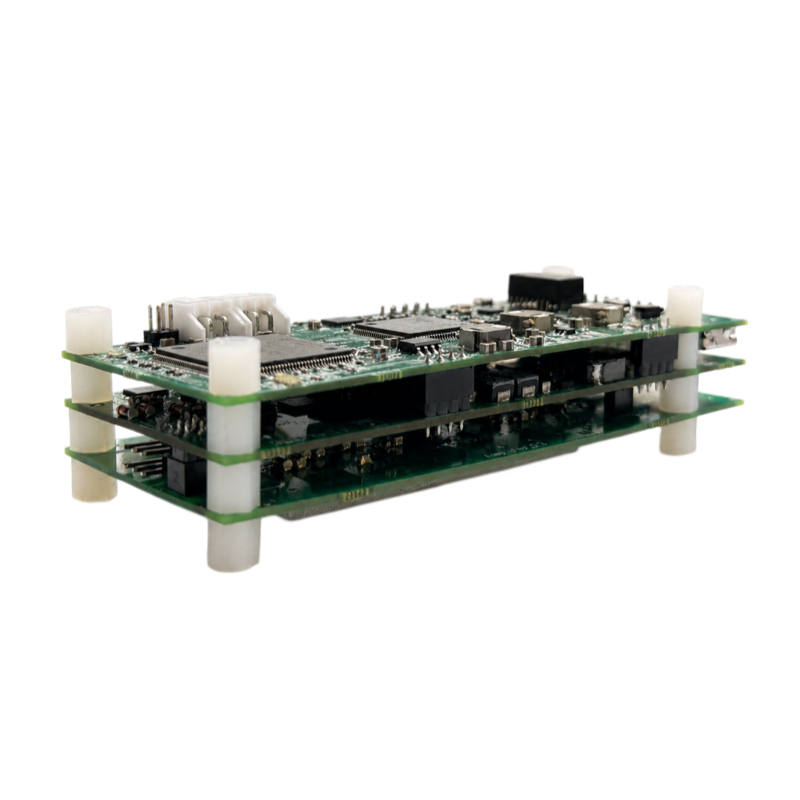
This EMAT module is mainly used to be mounted on carriers such as robots and drones to solve the challenges of aerial inspection.
Ürün No :
EMA600Sipariş (ADEDI) :
1Ödeme :
T/TÜrün Menşei :
CHINARenk :
GREENNakliye Limanı :
SAHNGHAIKurşun zamanı :
7DAYS
|
Parameter
|
Specification
|
|---|---|
|
Operating Ambient Temperature Range
|
-20 … +50 °C
|
|
Power Supply
|
12 V
|
|
Sound Velocity Setting Range
|
1000 … 9999 m/s, increment 1 m/s
|
|
Measurement Rate per Second
|
16
|
|
Overall Dimensions (without housing)
|
100 x 45 x 28 mm
|
|
Overall Dimensions (with housing)
|
120 x 50 x 40 mm
|
|
Steel Thickness Measurement Range (with lift-off)
|
2 mm – 80 mm
|
|
Steel Thickness Measurement Range (without lift-off)
|
2 mm – 200 mm
|
|
Thickness Measurement Error: 2..25 mm
|
≤ 0.08 + 0.001 H·mm
|
|
Thickness Measurement Error: 25..200 mm
|
≤ 0.1 + 0.005 H·mm
|
|
Communication Interface
|
Ethernet
|
|
Allowable Gap Between Sensor and Test Object
|
Depends on sensor
|
|
Supported Sensor Types
|
EMAT sensors, pulsed electromagnetic probes
|
|
Allowable Sensor Tilt Relative to Test Surface Normal
|
±25 degrees
|
|
Minimum Detectable Curvature Radius of Workpiece
|
≥ 10 mm
|
|
Device Operating Frequency
|
4 MHz
|
|
Test Object Surface Operating Temperature Range
|
-20 … +800 °C
|

EMA1000 Yüksek sıcaklık EMA ultrasonik kalınlık ölçer. Bu ultrasonik kalınlık ölçer, çelik boruları, haddelenmiş levhaları, çubukları ve çelik, alüminyum ve diğer metallerden yapılmış diğer ürünleri ölçmek için özel olarak geliştirilmiştir.
Detaylar
This EMAT module is mainly used to be mounted on carriers such as robots and drones to solve the challenges of aerial inspection.
Detaylar
EMA1800 Yüksek sıcaklık EMA(elektromanyetik akustik) kalınlık ölçer. Bu ultrasonik kalınlık ölçer, çelik boruları, haddelenmiş levhaları, çubukları ve çelik, alüminyum ve diğer metallerden yapılmış diğer ürünleri ölçmek için özel olarak geliştirilmiştir.
Detaylar
The EMA1900 EMAT thickness gauge is used for corrosion detection of metal materials such as storage tanks, metal plates, and oil and gas pipelines. It requires no coupling agent and does not need to grind the surface of the metal object; simply place the gauge on the object's surface to perform the measurement. This saves manpower, material resources, and financial resources while ensuring safety.
Detaylar
EMA3800 Yüksek sıcaklık ultrasonik kalınlık ölçer. Bu ultrasonik kalınlık ölçer, çelik boruları, haddelenmiş levhaları, çubukları ve çelik, alüminyum ve diğer metallerden yapılmış diğer ürünleri ölçmek için özel olarak geliştirilmiştir.
Detaylar
M1 ultrasonik çevrimiçi korozyon izleme sistemi, daldırmasız bir izleme sistemidir. Müdahaleci olmayan sistemlerimiz, en zorlu ortamlarda korozyon veya erozyondan kaynaklanan boru hattındaki metal kaybını sürekli olarak izlemek için elektromanyetik akustik dönüştürücü sensör teknolojisini ve kablosuz veri dağıtımını kullanır. Elektromanyetik akustik dönüştürücü tahribatsız muayene yöntemlerinin kullanılması nedeniyle, ölçüm sırasında prob ve metal parçalar 4 mm kaldırılabilir, böylece iş parçasının temizlenmesine gerek kalmaz ve iş parçasının kendisine zarar vermez. Ayrıca sistem, kullanıcıların nesnenin korozyon durumunu ve kalan hizmet ömrünü daha iyi değerlendirmesine yardımcı olmak için kaplama kalınlığındaki değişiklikleri de eş zamanlı olarak izleyebiliyor.
Detaylar
EMA2800 kalınlık ölçer, çelik boruları, haddelenmiş levhaları, çubukları ve çelik, alüminyum ve diğer metallerden yapılmış diğer ürünleri ölçmek için özel olarak geliştirilmiştir. Sensör ile metal arasındaki çalışma aralığı 8 mm'ye kadar kaldırılabilir.
Detaylar
The BEONDT DT1001 pulsed eddy current tester is a portable non-destructive testing device designed for rapid screening of corrosion and thickness reduction in metal structures with insulation or coating layers. The DT1001 is the basic, practical model in BEONDT's pulsed eddy current series, emphasizing rapid on-site screening and cost-effectiveness, making it suitable for industrial users who require regular large-area corrosion surveys. For more complex or higher-precision testing needs, BEONDT tech also offers upgraded models (such as the DT2008) to meet different scenarios.
DetaylarNo. 90, Innovation Avenue, Hefei, Anhui, China




Saatlerimiz
Pazartesi - Cuma: 09.00 - 19.00 (GMT+8)
 English
English العربية
العربية русский
русский español
español português
português Türkçe
Türkçe français
français 日本語
日本語 Deutsch
Deutsch 繁體
繁體






 IPv6 AĞ DESTEKLENİYOR
IPv6 AĞ DESTEKLENİYOR